




- 综合信息
- 详情
专利观察| 无人装备技术跟踪
发布日期:2026-01-23 来源:中船集团知识产权与成果管理微信公众号
基于对国外无人装备技术领域相关企业的专利态势跟踪和专利分析评估,本月值得关注的相关专利如下:
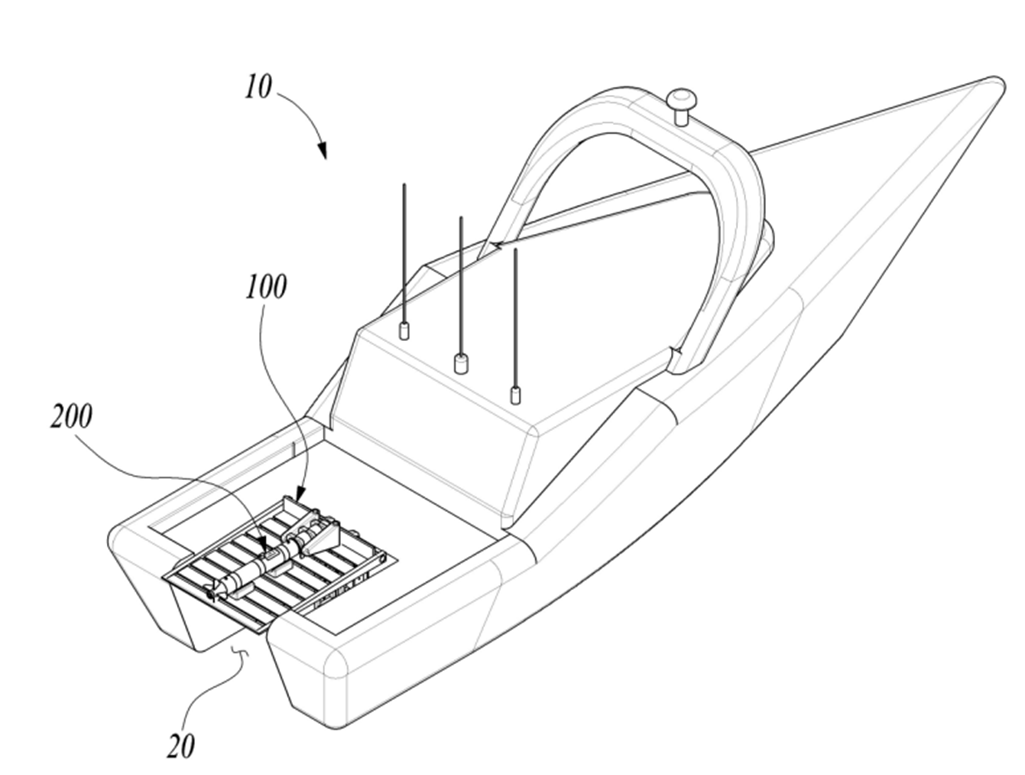
名称:自主无人潜水器收放装置海知汇
公开(公告)号:KR102909592B1
专利权人:韩国机器人融合研究院
技术问题:现有AUV收放方法在气象条件恶劣时无法操作,大船难以让AUV接近,小船收放时稳定性差,需要熟练的操控者才能完成收放。
技术方案:收放装置安装于船舶后艉,由支撑框架、旋转框架、液压油缸、升降甲板及 AUV 导向器构成,通过水平保持电机维持甲板水平,导向旋转电机调节导向器角度形成收纳通道,可拆卸夹具适配不同尺寸AUV,弹性支撑台稳定回收后的设备,方便后续作业。
技术功效:AUV回收范围更广、稳定性极高,可上升至水面储存,增强装置耐用性,方便后续开展额外作业。
名称:自主水下航行器海知汇
公开(公告)号:GB2642208A
专利权人:BEA系统公司
技术问题:现有AUV受能源技术限制,航程和续航能力不足。内燃机需频繁加油,污染及噪音大,还需辅助船只支持;核反应堆在AUV尺寸下不切实际且成本过高;电池能量密度低,需上浮充电,影响任务执行。
技术方案:自主水下航行器集成可充电储能装置与温差发电机,通过系绳、多关节机械臂等部署机构定位水下热源,利用温差发电为储能装置充电,控制器可监测发电量、优化发电位置,还能根据剩余电量规划含充电点的航线,大幅提升水下续航。
技术效果:集成温差发电机与可充电储能装置,借水下热源自主充电无需辅助船,噪音和污染排放更少且可多次充电,水下运行时间远超传统 AUV,还能自主检索水下热源位置规划含充电点的航线,保障任务高效完成。

名称:波浪能自主半潜船海知汇
公开(公告)号:IN202441081560A
专利权人:PLANYS TECHNOLOGIES PVT LTD
技术问题:传统海洋平台在续航、能源供给、有效载荷及运营成本上存在局限,电池供电AUV任务时间短,燃料驱动USV需频繁加油和维护。现有波浪能平台不适应浅海、多季风等复杂海况。另外,有效载荷集成架构不合理,运动传递效率低、稳定性差。
技术方案:半潜船由水面浮体单元、水下滑翔单元及系绳连接,波浪驱动浮体产生的垂直运动经系绳传递给滑翔单元,鳍间弹性元件存储释放能量放大振荡,水动力鳍将振荡转化为推进力,浮体搭载可再生能源收集装置,实现长期自主运行。
技术效果:无需持续外部推进或加油可实现长期自主海上作业,适配浅海、多季风等复杂海况且稳定性强,推进效率高还能通过弹性元件放大振荡运动,模块化有效载荷集成便于维护和重构,此外通过可再生能源收集维持电气系统运行延长部署周期。

- 运营单位:广东军荣知识产权运营有限公司
- 联系地址:广州市黄埔区科丰路270号1603房
- 联系方式:020-31605052

©广东军荣知识产权运营有限公司 版权所有 粤ICP备19139531号
 邮箱:junrong@csscip.com
邮箱:junrong@csscip.com

- 在线经纪人
-
gdjunrong@163.com
-
020-31605052
-

